Autonomous driving robots
designed for
factory automation
AGV
AGV Outline
The AGV series can:
Be site-customized.
Be controlled easily using the control system.
Control positioning precisely.
Perform positioning and obstacle detection using sensor technology.
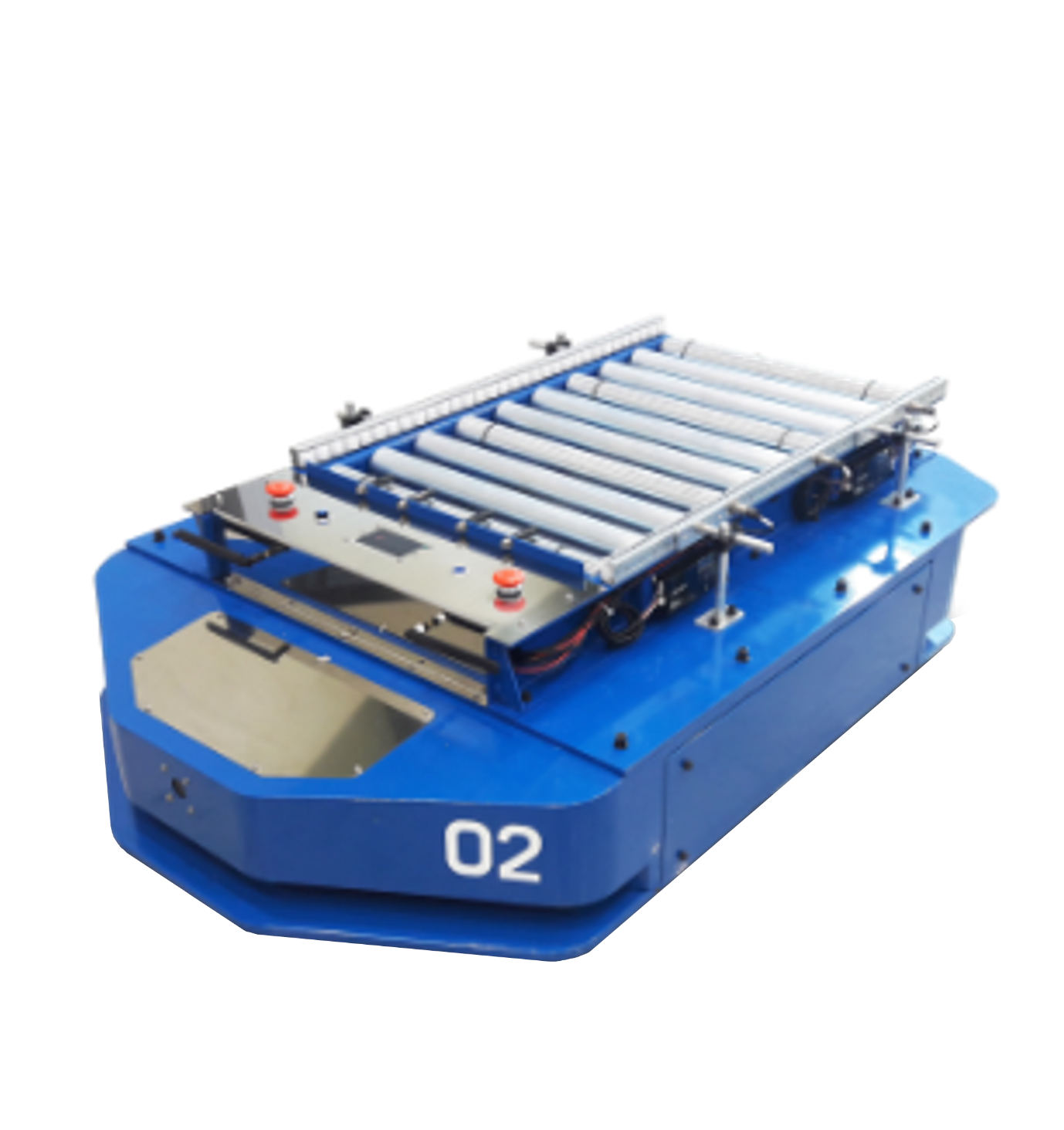
PSV1000
1,000 kg-class conveyor type robot
suitable for factory automation
Features of Robots
for Factory Automation
The AGV series has various guided approach technologies.
It has models for precise position control and various loading types.
Positioning and obstacle response using various sensor application technologies are possible.
It provides an environment where people and robots co-work.
It is possible to control multiple robots using self-developed FMS centrally.
It is possible to operate the SCADA system for compatibility with industrial equipment.
Technology Using the Guidance Methods
Guidance Methods
Spot guidance method
Optical guidance method
Self-guidance method
Image processing situation recognition method
Lineup
AGV - QR guidance, laser guidance
AMR - 2D SLAM, 3D SLAM
Products
Incorporating the characteristics of the AGV and AMR
SLAM (driving) + docking (QR or LASER)
Technology
Driving · Management
Image processing method
+ QR-based autonomous drivingPrecision docking integrating QR, 3D Depth Camera, etc
Autonomous driving position error range within ± 50 mm
Within the error range of QR-guided driving position ± 5 mm
Robot status check
(condition, battery, location)Precision docking integrating QR, 3D Depth Camera, etc
Automatic charging management based on the remaining battery level
Easy location initialization
Stability · Convenience
Deceleration with obstacle detection /
Emergency button embeddedConstant grounding and loading stability through six-wheel driving
(4 front / rear auxiliary casters, 2 driving wheels)
Easy installation
- Map building and route / destination settingFlexible layout changes
Customer specific requirement production
Various loading types such as conveyors and lifts
User interface (UI) tailored to customer needs and preferences
Control System
Task assignment
Map saving
Robot path planning
Robot traffic management
Compatible with various industrial protocols
Automatic door interlock / control
Work statistics
Robot status
Robot location
Detailed Specification
- Basic Specification
- Size (LWH) 1,100 x 1,660 x 350 mm
- Loading / Unloading Type Conveyor
- Loading Weight 1,000 kg
- Following Method SLAM, QR + SLAM, QR
- Speed Max. 1.0 m/s
- Driving Method DD Type
- Charging Hours 2hours
- Operating Hours 8hours
- Battery & Motion Performance
- Battery 24 V 80 A / 48 V 80 A
- Charging Method Automatic charge / Manual charge
- Stop Precision - SLAM Within the error range of ± 50 mm
- Stop Precision - QR Within the error range of ± 5 mm
- Max. Gradability 5 ˚